

工业机器人科普 好全面啊
【keywords start】机器人【keywords end】 机器人的发展越来越受到人们的欢迎和重视。 现在很多传统行业都在生产作业中引入了工业机器人。 随着机器人的改进和优化,工业机器人在传统加工制造业中的重要性也越来越大。 越是明显。
那么,什么是工业机器人? 内部结构是什么样的? …..相信看完本文,您会对工业机器人技术有一个系统全面的了解!
工业机器人科学













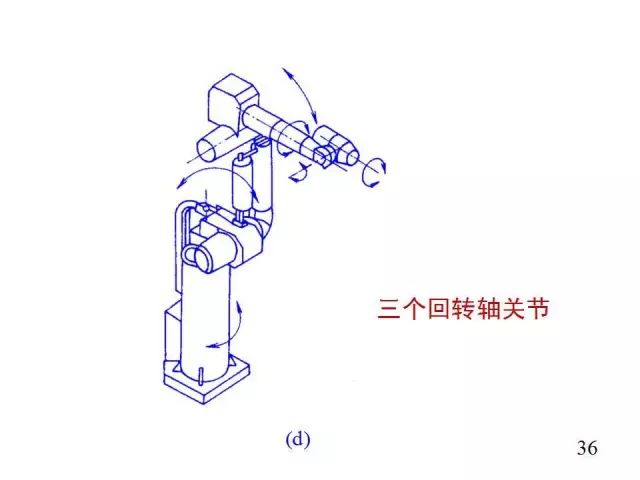




工业机器人的分类
移动机器人

移动机器人(AGV)是工业机器人的一种。 可广泛应用于机械、电子、纺织、卷烟、医疗、食品、造纸等行业的柔性搬运、传动等功能。 还应用于自动化立体仓库和柔性加工。 系统、柔性装配系统(采用AGV作为移动装配平台); 同时还可作为车站、机场、邮局取件的代步工具。
点焊机器人

焊接机器人具有性能稳定、工作空间大、移动速度快、负载能力强等特点。 焊接质量明显优于手工焊接,大大提高了点焊作业的生产率。
弧焊机器人

弧焊机器人主要应用于各种汽车零部件的焊接生产。 在该领域,国际大型工业机器人制造商主要向成套设备供应商提供单元产品。
激光加工机器人

激光加工机器人将机器人技术应用到激光加工中,通过高精度工业机器人实现更加灵活的激光加工作业。 该系统可以在线操作,也可以离线编程。
机器人自动检测工件,生成工件模型,进而生成加工曲线。 还可以利用CAD数据直接加工。 可用于工件的激光表面处理、钻孔、焊接和模具修复。
真空机器人

真空机器人是在真空环境下工作的机器人。 主要用于半导体行业在真空室内传送晶圆。 真空机械手进口困难、受到限制、使用量大、通用性强。 它们已成为制约半导体成套装备研发进度和整机产品竞争力的关键部件。
清洁机器人

洁净机器人是应用于洁净环境的工业机器人。 随着生产技术水平的不断提高,其对生产环境的要求也越来越苛刻。 许多现代工业产品都要求在清洁的环境中生产。 洁净机器人是洁净环境下生产所需的关键设备。
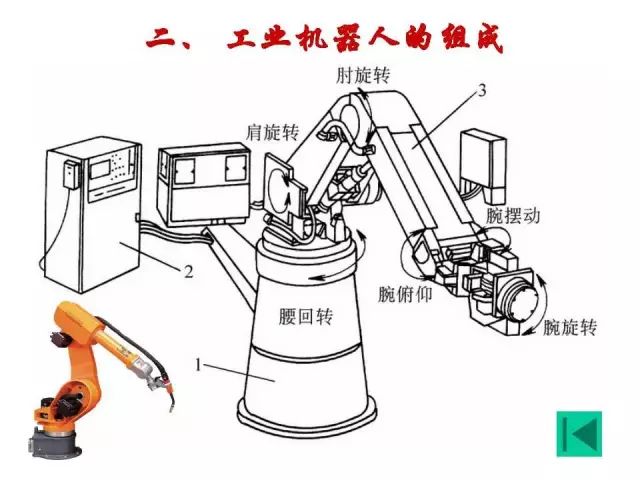
工业机器人内部结构

1、机器人驱动装置
概念:要使机器人运行,需要为每个关节,即每个运动自由度安装传动装置。 作用:为机器人各部件和关节的运动提供驱动力。
驱动系统:可以是液压传动、气动传动、电动传动,也可以是它们相结合的综合系统; 它可以直接驱动,也可以通过同步带、链条、齿轮系、谐波齿轮等机械传动机构间接驱动。
1、电力驱动装置

电力驱动装置能源简单、变速范围宽、效率高、速度和位置精度高。 但它们大多与减速齿轮相连,难以直接驱动。
电力驱动装置可分为直流(DC)、交流(AC)伺服电机驱动器和步进电机驱动器。 直流伺服电机电刷容易磨损并产生火花。 无刷直流电机也得到越来越广泛的应用。 步进电机驱动多为开环控制,控制简单但功耗较低,多用于低精度、低功耗的机器人系统。
电动机通电前必须进行下列检查:
1)供电电压是否合适(过压容易造成驱动模块损坏); 直流输入的+/-极性一定不能接错,驱动控制器上的电机型号或电流设定值是否合适(一开始不要做太大);
2)控制信号线必须连接可靠,工业现场最好考虑屏蔽问题(如使用双绞线);
3)一开始不要把需要连接的线全部连接好。 只连接最基本的系统。 运行良好后,逐步连接。
4)一定要搞清楚接地方式,或者采用浮空不连接的方式。
5)开始运转后半小时内,密切观察电机的状况,如动作是否正常、声音、温升等,发现问题应立即停机调整。
2、液压驱动
它由高精度的气缸和活塞完成,通过气缸和活塞杆的相对运动来实现直线运动。
优点:功率大,可省略减速装置而直接连接从动杆,结构紧凑,刚性好,响应快,伺服驱动精度高。
缺点:需要额外的液压源,容易出现液体泄漏。 不适合高温和低温情况。 因此,液压驱动目前多用于极高功率的机器人系统。
选择合适的液压油。 防止固体杂质混入液压系统,防止空气、水侵入液压系统。
机械操作应轻柔、平稳,避免粗暴的机械操作,否则必然产生冲击载荷,造成机械故障频繁,大大缩短使用寿命。 注意气蚀和溢流噪音。 操作过程中,要经常注意液压泵和溢流阀的声音。 如果液压泵有“气蚀”噪声,且排气后无法消除,应查明原因,排除故障后再使用。 保持适当的油温。 液压系统的工作温度一般控制在30~80℃之间。
3. 气动驱动
气压驱动结构简单、干净、动作灵敏、有缓冲作用。 但与液压驱动装置相比,其功率较小、刚度差、噪声大、速度控制困难,多用于精度不高的点控机器人。
(1)具有速度快、系统结构简单、维护方便、价格低廉等特点。 适用于中、小负载机器人。 但由于伺服控制较难实现,多用于程控机器人,如上下料、冲压机器人等。
(2)多数情况用于实现两位或有限点控制的中小型机器人。
(3)目前控制设备大多采用可编程控制器(PLC控制器)。 在易燃、易爆场合,可采用气动逻辑元件组成控制装置。
2、直线传动机构
传动装置是连接动力源和运动连杆的关键部件。 根据接头形式,常用的传动机构有直线传动机构和旋转传动机构。
直线传动方式可用于直角坐标机器人的X、Y、Z向驱动,圆柱坐标结构的径向驱动和垂直升降驱动,球坐标结构的径向伸缩驱动。
直线运动可以通过齿条、小齿轮、丝杠螺母等传动元件将旋转运动转变为直线运动,也可以由直线驱动电机驱动,也可以由气缸或液压缸的活塞直接产生。
1、齿轮、齿条装置
通常机架是固定的。 齿轮的旋转运动转换为托盘的直线运动。
优点:结构简单。
缺点:收益差较大。
2.滚珠丝杠
滚珠镶嵌在螺杆和螺母的螺旋槽内,滚珠可通过螺母内的导向槽连续循环。
优点:摩擦小、传动效率高、无爬行、精度高;
缺点:制造成本高、结构复杂。
自锁问题:理论上滚珠丝杠副也可以自锁,但实际应用中并没有采用这种自锁。 主要原因是:可靠性差或加工成本高; 由于直径导程比很大,一般会加装蜗轮等自锁装置。
3、旋转传动机构
使用旋转传动机构的目的是将电机驱动源输出的较高转速转换为较低转速,并获得较大的扭矩。 机器人常用的旋转传动机构有齿轮链、同步带和谐波齿轮等。
1.齿轮链条
(1)速度关系
(2)矩关系
2.正时皮带
同步带是具有许多异形齿的皮带,与同样具有异形齿的同步带轮啮合。 其工作原理类似于软齿轮。
优点:不打滑、灵活性好、价格便宜、重复定位精度高。
缺点:有一定的弹性变形。
3. 谐波齿轮
谐波齿轮由三个主要部分组成:刚性齿轮、谐波发生器和柔性齿轮。 一般情况下,刚性齿轮是固定的,谐波发生器驱动柔性齿轮旋转。
主要特征:
(1)传动比大,单级50-300。
(2)传动平稳,承载能力高。
(3)传动效率高,可达70%-90%。
(4)传动精度高,比普通齿轮传动高3-4倍。
(5)滞后小,可小于3’。
(6)无法获得中间输出,柔轮刚度低。
谐波传动装置在机器人技术相对先进的国家已得到广泛应用。 仅在日本,就有60%的机器人驱动装置采用谐波传动。
美国送上月球的机器人在所有关节处都采用了谐波传动装置。 其中一个上臂采用了 30 个谐波传动机构。
苏联送上月球的移动机器人“月球登陆者”成对安装的8个轮子由密封谐波传动机构单独驱动。 德国大众公司开发的ROHREN、GEROT R30机器人和法国雷诺公司开发的VERTICAL 80机器人均采用谐波传动机构。
4、机器人传感系统
1.传感系统由内部传感器模块和外部传感器模块组成,以获得有关内部和外部环境条件的有意义的信息。
2、智能传感器的使用提高了机器人的机动性、适应性和智能性。
3、智能传感器的使用提高了机器人的机动性、适应性和智能性。
4.对于一些特殊信息,传感器比人类感觉系统更有效。
5. 机器人位置检测
旋转光学编码器是最常用的位置反馈设备。 光电探测器将光脉冲转换为二进制波形。 通过对脉冲数进行计数得到轴的旋转角度,通过两个方波信号的相对相位来确定旋转方向。
感应同步器输出两个模拟信号——轴旋转角度的正弦和余弦。 根据这两个信号的相对幅度计算轴的旋转角度。 感应同步器通常比编码器更可靠,但分辨率较低。
电位计是位置检测最直接的形式。 它连接在桥中并产生与轴旋转角度成比例的电压信号。 但由于分辨率低、线性度差、对噪声敏感。
转速计能够输出与轴的转速成比例的模拟信号。 如果没有这样的速度传感器,则可以通过相对于时间差分检测位置来获得速度反馈信号。
6. 机器人受力检测
力传感器通常安装在操作臂上的以下三个位置:
1.安装在关节驱动器上。 可以测量驱动器/减速器本身的扭矩或力输出。 然而,末端执行器与环境之间的接触力无法很好地检测。
2、安装在末端执行器与操作臂末端关节之间,可称为腕力传感器。 通常,可以测量施加到末端执行器的三到六个力/力矩分量。
3.安装在末端执行器的“指尖”上。 通常,它们的力感测手指中内置有应变计,可以测量作用在指尖上的力的一到四个分量。
7. 机器人与环境交互系统
1、机器人-环境交互系统是实现工业机器人与外部环境中的设备互联、协调的系统。
2.工业机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等,也可以是多个机器人、多台机床或设备、多个零件存储装置的集成, ETC。
3、也可以是多个机器人、多个机床或设备、多个零件存储装置等集成为一个功能单元,执行复杂的任务。
8、人机交互系统
人机交互系统是让操作人员参与机器人控制并与机器人进行通信的装置。 该系统可概括为两类:指令发出装置和信息显示装置。
机器人控制系统相关知识
什么是机器人控制系统
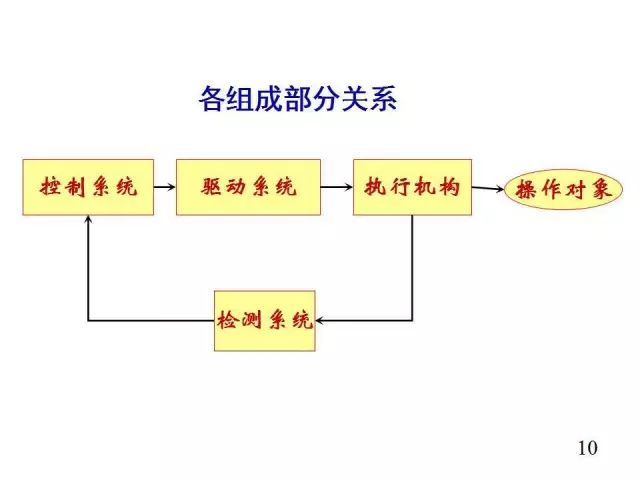
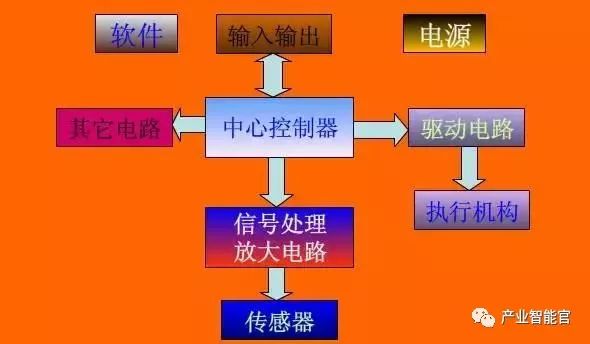
如果只有感觉器官和肌肉,人类的四肢仍然无法移动。 一方面,这是因为没有器官来接收和处理来自感官的信号。 另一方面,也是因为没有器官发出神经信号来驱动肌肉收缩或放松。 同样,如果机器人只有传感器和执行器,机械臂也无法正常工作。 原因是传感器输出的信号不起作用,驱动电机得不到驱动电压和电流。 因此,机器人需要一个控制器,用硬件和软件组成一个完整的控制系统。
机器人控制系统的功能是接收传感器的检测信号,并根据作业任务的要求驱动机器人手臂中的各个电机。 就像我们人类的活动依赖于自身的感官一样,机器人的运动控制也离不开传感器。 机器人需要传感器来检测各种状态。 机器人内部传感器信号用于反映机器人手臂关节的实际运动状态,机器人外部传感器信号用于检测工作环境的变化。
因此,机器人的神经和大脑结合起来就可以构成完整的机器人控制系统。
机器人的运动控制系统包括哪些方面?
执行器——伺服电机或步进电机;
驱动机构——伺服或步进驱动器;
控制机构——运动控制器,进行路径和电机联动的算法计算控制;
控制方式——如果有固定的执行方式,则用固定的参数对运动控制器进行编程; 如果有视觉系统或其他传感器,根据传感器信号,用非固定参数对运动控制器进行编程。
机器人控制系统基本功能
控制机械臂末端执行器的运动位置(即控制末端执行器经过的点和运动路径);
控制机械臂的运动姿态(即控制相邻两个活动部件的相对位置);
控制运动速度(即控制末端执行器运动位置随时间的变化);
控制运动加速度(即控制末端执行器运动过程中的速度变化);
控制机械臂中各动力关节的输出扭矩:(即控制作用在操作物体上的力);
具有易于操作的人机交互功能,机器人通过记忆和再现完成指定任务;
使机器人能够检测和感知外部环境。 工业机器人配备视觉、力、触觉等传感器来测量、识别和判断作业条件的变化。
工业机器人控制系统
1、工业机器人控制系统硬件结构
控制器是机器人系统的核心,国外相关公司对我国实施了严格封锁。 近年来,随着微电子技术的发展,微处理器的性能越来越高,价格也越来越便宜。 目前,市场上已出现售价1至2美元的32位微处理器。 高性价比的微处理器给机器人控制器带来了新的发展机遇,使得开发低成本、高性能的机器人控制器成为可能。 为了保证系统有足够的计算和存储能力,目前的机器人控制器大多由ARM系列、DSP系列、POWERPC系列、Intel系列等计算能力较强的芯片组成。
此外,由于现有通用芯片的功能和性能不能完全满足一些机器人系统在价格、性能、集成度、接口等方面的要求,这就催生了机器人对SoC(System on Chip)技术的需求。将特定的处理器与所需的接口集成在一起,可以简化系统外围电路的设计,缩小系统尺寸,降低成本。 例如,Actel将NEOS或ARM7处理器内核集成到其FPGA产品中,形成完整的SoC系统。 在机器人运动控制器方面,其研究主要集中在美国和日本,已有成熟的产品,如美国DELTATAU公司、日本鹏力株式会社等,其运动控制器以DSP技术为核心。核心并采用基于PC的开放式结构。
2、工业机器人控制系统架构
在控制器架构方面,其研究重点是功能划分和功能间信息交换的规范。 在开放控制器架构研究方面,有两种基本结构。 一种是基于硬件分层划分的结构。 这种类型的结构比较简单。 在日本,架构是根据硬件来划分的。 例如,三菱重工公司生产的PA210便携式通用智能手臂机器人的结构分为五层; 另一种是基于功能划分的结构,将软件和硬件结合考虑,这是机器人控制器架构研发的方向。
3. 控制软件开发环境
在机器人软件开发环境方面,一般工业机器人公司都有自己独立的开发环境和独立的机器人编程语言,如日本Motoman公司、德国KUKA公司、美国Adept公司、瑞典ABB公司等,很多大学都做了很多工作机器人开发环境(RobotDevelopmentEnvironment)的研究,提供了大量的开源代码,可以在一些机器人硬件结构下进行集成和控制。 许多相关实验已在实验室环境中进行。 国内外现有的机器人系统开发环境有TeamBots、v.2.0e、ARIA、V.2.4.1、Player/Stage、v.1.6.5.1.6.2、Pyro.v.4.6.0、CARMEN.v。 1.1 .1、MissionLab.v.6.0、ADE.V.1.0beta、Miro.v.CVS-2006 年 3 月 17 日、MARIE.V.0.4.0、FlowDesigner.v.0.9.0、RobotFlow.v.0.2.6等等等等。 从机器人产业的发展来看,对机器人软件开发环境有两方面的需求。 一方面来自机器人终端用户。 他们不仅使用机器人,还希望通过编程赋予机器人更多的功能。 这种编程通常使用可视化编程语言来实现,例如Lego MindStormsNXT和Microsoft Robotics Studio的图形化编程环境。 提供可视化编程环境。
4. 机器人专用操作系统
(1)VxWorks,VxWorks操作系统是美国WindRiver公司于1983年设计开发的嵌入式实时操作系统(RTOS),是Tornado嵌入式开发环境的关键组成部分。 VxWorks具有可定制的微内核结构; 高效的任务管理; 灵活的任务间通信; 微秒级中断处理; 支持POSIX1003.1b实时扩展标准; 支持多种物理介质和标准、完整的TCP/IP网络协议等。
(2)WindowsCE,WindowsCE与Windows系列具有良好的兼容性,这无疑是WindowsCE推广的一大优势。 Windows CE 提供了一个功能丰富的操作系统平台,用于为手持设备和无线设备构建动态应用程序和服务。 它可以在多种处理器架构上运行,通常适用于对内存占用有一定限制的应用程序。 的设备.
(3)嵌入式Linux,由于它的源代码是开放的,人们可以任意修改它来满足自己的应用。 其中大多数都符合 GPL 标准并且是开源且免费的。 稍作修改即可应用于用户自己的系统。 开发人员群体庞大,不需要专门人才,只要懂Unix/Linux、懂C语言就可以。 支持的硬件数量巨大。 嵌入式Linux和普通Linux没有本质区别。 几乎所有 PC 上使用的硬件都受嵌入式 Linux 支持。 而且提供了各种硬件的驱动源代码,这给用户为自己专有的硬件编写驱动带来了极大的方便。
(4)μC/OS-Ⅱ,μC/OS-Ⅱ是著名的实时内核,源代码开放。 它专为嵌入式应用而设计,可用于8位、16位和32位微控制器或数字信号处理器(DSP)。 其主要特点是代码开源、良好的可移植性、可固化性、可裁剪性、抢占式内核、可确定性等。
(5)DSP/BIOS,DSP/BIOS是TI为其TMS320C6000TM、TMS320C5000TM和TMS320C28xTM系列DSP平台专门设计开发的可扩展实时多任务操作系统内核。 它是 TI CodeComposerStudioTM 开发工具的组成部分。 一。 DSP/BIOS主要由三部分组成:多线程实时内核; 实时分析工具; 芯片支持库。 利用实时操作系统开发程序可以快速、方便地开发复杂的DSP程序。
5、机器人伺服通讯总线技术
目前,国际上还没有专用于机器人系统的伺服通信总线。 在实际应用中,通常根据系统要求使用一些常用的总线,如以太网、CAN、1394、SERCOS、USB、RS-485等。 在机器人系统中。 目前的通信控制总线大多可以概括为两类,即基于RS-485和线路驱动器技术的串行总线技术和基于实时工业以太网的高速串行总线技术。
智能机器人控制系统
(1)开放式模块化控制系统架构:采用分布式CPU计算机结构,分为机器人控制器(RC)、运动控制器(MC)、光电隔离I/O控制板、传感器处理板和编程显示示教盒等。控制器(RC)与编程示教盒通过串口/CAN总线进行通信。 机器人控制器(RC)主计算机完成机器人的运动规划、插补和位置伺服以及主控制逻辑、数字I/O、传感器处理等功能,编程示教盒完成信息显示和按钮输入。
(2)模块化、分层式控制器软件系统:软件系统建立在开源实时多任务操作系统Linux之上,采用分层式、模块化的结构设计,实现了软件系统的开放性。 整个控制器软件系统分为三个层次:硬件驱动层、核心层和应用层。 这三个层次面向不同的功能需求,对应不同的发展层次。 系统中的每一级都由若干功能相对相反的模块组成。 这些功能模块相互配合,实现该级别提供的功能。
(3)机器人故障诊断与安全维护技术:通过各种信息诊断机器人故障并进行相应的维护,是保证机器人安全的关键技术。
(4)网络化机器人控制器技术:目前,机器人应用项目正从单一的机器人工作站向机器人生产线发展,机器人控制器的网络化技术变得越来越重要。 该控制器具有串口、现场总线和以太网联网功能。 可用于机器人控制器之间、机器人控制器与上位机之间的通信,方便对机器人生产线的监控、诊断和管理。
机器人控制架构
如果说驱动子系统是机器人的肌肉,能量子系统是机器人的心脏,那么控制与决策子系统就是机器人的大脑。 这是机器人最重要、最复杂的子系统。
机器人是一种高度复杂的自动化设备。 Its control subsystem is also directly derived from other applications in the field of automation, such as processors, circuits and standards used in factory automation. This chapter only lists and compares several common and typical control system topologies, and then analyzes the composition of several typical robot control subsystems, especially the control architecture of the “Creative Star” robot.
Several typical robot control architectures (ARCHITECHURE)
Here we do not discuss traditional industrial robots, but mainly focus on new forms of robots such as autonomous mobile robots and bionic robots. Generally, the architecture of a robot refers to the structural framework of one or more robots that organically combines various modules such as perception, modeling, planning, decision-making, and action to complete target tasks in a dynamic environment. Generally speaking, the current control architecture of autonomous robots can be divided into the following categories:
1. Program-controlled architecture, also known as planning architecture, means that the planner gives a sequence of behavioral actions based on the given initial state and target state, and executes them step by step. More complex program-controlled models will also adjust the control strategy based on sensor feedback, for example, using methods such as “conditional judgment + jump” in the sequence of the program.
2. Inclusive architecture and behavior-based control model, also known as reactive model, complex tasks are decomposed into a series of relatively simple specific behaviors, which are based on sensor information and controlled for one aspect of the comprehensive goal. The behavior-based robot system can respond quickly to changes in the surrounding environment and has good real-time performance, but it does not make a global plan for the task, so it cannot guarantee that the realization of the goal is optimal.
3. Hybrid architecture is an integrated system based on planning and behavior. It is not only sensitive to changes in the environment, but also ensures the efficiency of achieving goals. Generally, there are two modes of hybrid architecture: one mode is that the large framework of the decision-making system is based on planning, and is dominated by the behavioral model when encountering dynamic situations; the other mode is that the large framework of the decision-making system is based on behavior, Use planning models in specific actions. In short, the design purpose of hybrid architecture is to combine the advantages of program-controlled architecture and inclusive architecture as much as possible and avoid their disadvantages.




